
Kendali optimal Linier Quadratic Gaussian (LQG) adalah teknik kendali modern yang diimplementasikan dalam bentuk ruang dan waktu (state space) yang digunakan untuk mendesain dinamik optimal regulator. Pada perjalanan perkembangan konsep, LQR (Linear Quadratic Regulator) mengalami pengembangan yaitu dengan menambahkan estimator optimal (fiter Kalman) yang berfungsi menyaring noise (derau) dalam bentuk sinyal Gaussian (noise yang dibangkitkan dari alam). Konsep pengembangan itu diperkenalkan pada tahun 1970 dengan nama Linier Quadratic Gaussian (LQG). Pada konsep LQG diperkenalkan konsep teori pemisahan (separation theorem) atau sering disebut Certainty Equivalence Principle. Dari hasil tersebut penguatan umpan balik dan filter dalam LQG dirancang secara terpisah.
Pengendali LQG (bertin, 1998), telah diaplikasikan pada model kapal Gaeta Class Minehunter, dan menghasilkan kemampuan tracking yang ditunjukkan pada saat berada pada gangguan arus laut dan angin. Strategi pengendali robust yang lain yaitu H~ untuk autopilot kapal, dengan fungsi transfer dihitung berdasarkan eksperimen saat uji belok. Simulasi pengendali dilakukan terhadap kapal ferry Mascarenas, kapal Zuidweg, kapal Chislet, dan diperoleh respon yang baik.[3]
Pada Tugas Akhir saya, LQG diterapkan pada kapal patroli FPB 38. Saya menangani noise dari gelombang laut.
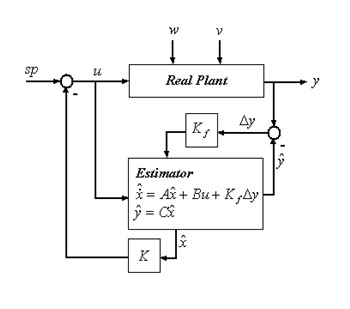
Gambar 2.4 Kendali umum LQG[1]
Model state space :

Keterangan :
u : Input proses.
y : Output proses.
w : gangguan proses.
v : gangguan pengukuran (white noise)
A : Matrik plant.
B : Matrik kendali input.
C : Matrik pengukuran.
K : Peguatan umpan balik (Kalman).
Kf : Penguatan filter Kalman.
untuk mencari sinyal kendali optimal u diperlukan penguat pengendali K (Regulator) dan penguat estimator Kf (Filter Kalman) yang optimal. Untuk menjaga sistem tetap stabil, diperlukan controller dan estimator yang stabil. Menurut teorema pemisahan dijelaskan bahwa harga K dan Kf bisa diperoleh secara terpisah. Pencarian harga K dilakukan secara seolah-olah sistem bersifat deterministik yaitu dengan metode LQR, sedangkan pencarian harga Kf optimal dilakukan dengan sistem bersifat stokastik, yaitu index performansi kesalahan minimum.
Besarnya harga :

Untuk mencari besarnya S dapat menggunakan persamaan Riccati:


Qc menentukan matriks keadaan dan Rc menentukan matriks kendali. Penentuan besarnya matrik Qc dan Rc tergantung dari si-pendesain (Lewis, F.L., 1992). Karena Qc dan Rc adalah sebagai matriks nilai bobot pada indeks performansi.
Filter Kalman merupakan estimator optimal yang berfungsi mengestimasi variabel keadaan dan menyaring noise (derau). Prinsip kerja estimator berdasarkan sifat rekursif. Optimisasi yang dilakukan adalah dengan menekan harga error kovarian sekecil mungkin. maka, indeks performansinya atau cost function-nya dapat ditulis :

 adalah harga estimasi dari variabel x dalam fungsi waktu. Estimasi variabel keadaan optimal diperoleh dari sistem dinamik filter Kalman sebagai berikut :
adalah harga estimasi dari variabel x dalam fungsi waktu. Estimasi variabel keadaan optimal diperoleh dari sistem dinamik filter Kalman sebagai berikut :
Penguatan Filter Kalman :

Sedangkan Matriks P diperoleh dari persamaan Riccati :


Dengan asumsi-asumsi matriks A dan B terkendali, dan C teramati, maka filter Kalman dijamin stabil asimtotik. Matriks Qf dan Rf adalah noise covariance, dengan noise proses w(t) ~ (0,Qf) dan pengukuran n(t)~(0,v2Rf) adalah white noise. Matriks pembobot pada indeks performansi dipilih untuk menggunakan performansi desain kendali. Untuk menentukan matriks pembobot Q dan R dapat dilakukan menggunakan metode trial-error.
maka filter Kalman dijamin stabil asimtotik. Matriks Qf dan Rf adalah noise covariance, dengan noise proses w(t) ~ (0,Qf) dan pengukuran n(t)~(0,v2Rf) adalah white noise. Matriks pembobot pada indeks performansi dipilih untuk menggunakan performansi desain kendali. Untuk menentukan matriks pembobot Q dan R dapat dilakukan menggunakan metode trial-error.Metode trial-error merupakan metode yang sangat sederhana dan praktis, yang dilakukan dengan memilih komponen matriks dengan cara mencoba harga sembarang sesuai keluaran yang diinginkan dan dibandingkan terhadap keluaran sebelumnya. Metode ini memiliki nilai matriks yang berulang-ulang.
Ada beberapa kaidah yang bermanfaat dalam penentuan matriks pembobot agar mendekati harga yang diinginkan :
- Harga matriks pembobot Q dipilih yang besar agar penguatan umpan balik besar.
- Apabila matriks pembobot R dipilih yang besar, maka penguatan kendali umpan balik K mengecil sehingga respon sistem menjadi lambat.
Dengan mengetahui pemodelan dari sistem, maka akan didapatkan persamaan ruang keaadaan, parameter pada sistem A, variabel keadaan sistem x(t), dan parameter masukan pada B. Langkah selanjutnya adalah :
- Memilih nilai matriks Q dan R dengan memberikan harga sembarang.
- Menyelesaikan persamaan Riccati.
- Apabila respon dan keluaran sistem tidak optimal, masukan nilai Q dan R dengan harga sembarang sampai diperoleh respons waktu keluaran yang diinginkan sesuai dengan indeks performansi minimum.[6]
Kriteria robust pada sebuah sistem kendali dapat dipenuhi apabila sistem yang dikendalikan mempunyai sifat reachable/controllable (dapat dikendalikan) dan bersifat observable. Sebuah sistem dinyatakan dalam persamaan 2.36 dan 2.37 dimana  , dikatakan reachable/controllable.
, dikatakan reachable/controllable.
, dikatakan reachable/controllable.Jika semua vector x adalah reachable, maka jika satu mampu mencari sebuah input kendali untuk mengerakkan sistem tersebut dari nol sampai pada kondisi state yang diharapkan di suatu waktu final tertentu, sistem tersebut memiliki matriks controllability. Matriks ini didefinisikan dalam bentuk persamaan berikut ini,
Persamaan keadaan sistem yang dinyatakan dalam (2.36 dan 2.37) dengan H = C dikatakan observable apabila matriks Vk mempunyai rank = n.

Sistem dikatakan observable jika dan hanya jika rank (Vn) = n.[3]
Diagram blok sistem diatas kurang jelas mungkin ya,, dulu sewaktu saya mengerjakan Tugas Akhir, saya menggunakan diagram blok dari buku pak Ogata [2], ne dia diagram bloknya,

Antara diagram blok dari Pak Ogata ini dan state space-nya nyambung banget, jadi dulu saya pake ini, biar gampang waktu jelasin ke penguji. Begitulah trik saya, dan memang menurut saya lebih baik kalau kita gak ngerti, jangan dipake n sok2an ngerti. Karena lebih nyambung pakai yang ini, ya udah ini ajah.
So, untuk teori Kendali LQG cukup sekian kawan-kawan. Dan karena teori ini mengutip dari beberapa buku, saya sertakan juga asal kutipannya ya, untuk referensi juga kalau ada yang pengen tahu lebih lanjut, silahkan nyari bukunya dan dibaca baik-baik..
[1] Lewis, Frank L. Applied Optimal Control & Estimation (Digital Design & Implementation). 1992. Prentice Hall International Inc.
[2] Ogata, Katsuhiko. Modern Control Engineering 4th Edition. 2002. Prentice Hall.
assalam kak...salam kenal sebelumnya, saya eko..
BalasHapusmaaf sebelumnya...boleh nggak saya minta jurnal yang jadi refrensi [3]...??
klo boleh, tolong dikirmn ke email saya kak ekoagustavala@gmail.com
trimakasih sebelumnya kak...
sebelumnya, salam kenal juga eko.
Hapuswaduh saya ga yakin masih menyimpan softcopy jurnalnya atau tidak. yang print outnya di rumah Lamongan, saya lg tinggal di jakarta sekarang. nanti saya cek lagi ya...
kalo boleh tahu sedang kuliah dimana? coba langsung cari disertasi ibu Aisyah di perpustakaan ITS (kalau tidak salah lantai 2). namun tidak bisa dipinjam, melainkan dibaca di tempat.
-dina-
assalamualaikum mbak, perkenalkan saya Dara, mahasiswa elektro. untuk Tugas Akhir rencanya saya ingin menggunakan Pengendali LQG. bisa sharing gak mbak? terima kasih sebelumnya :)
BalasHapus